



|
詳細情報 |
|||
| ボディ材質: | 航空機等級のアルミ合金、精密機械化 | 重量: | 92.8KG (付属品、パッケージおよび制御箱なしで) |
|---|---|---|---|
| ディメンション: | 長さ920mm *幅625mm *高さ515mm | 電池: | DC24Vの鉛の酸の充電電池 |
| 労働時間: | 5時間以下 | 最高のグリッパーの拡張の範囲: | 255mm |
| 最高のメカニカル・アームの広がり: | 1960mm | 拡張可能なメカニカル・アームの長さ: | 500mm |
| 最高の動きの速度: | 1m/s (ノート:リモート・コントロール、stepless速度control.maxの速度は24V電池に基づいて1m/sについてあります。) | 等級の能力: | それは45°の斜面に上り、斜面で着実に停止できます。 |
| ハイライト: | eod 用具および装置,eod 装置 |
||
製品の説明
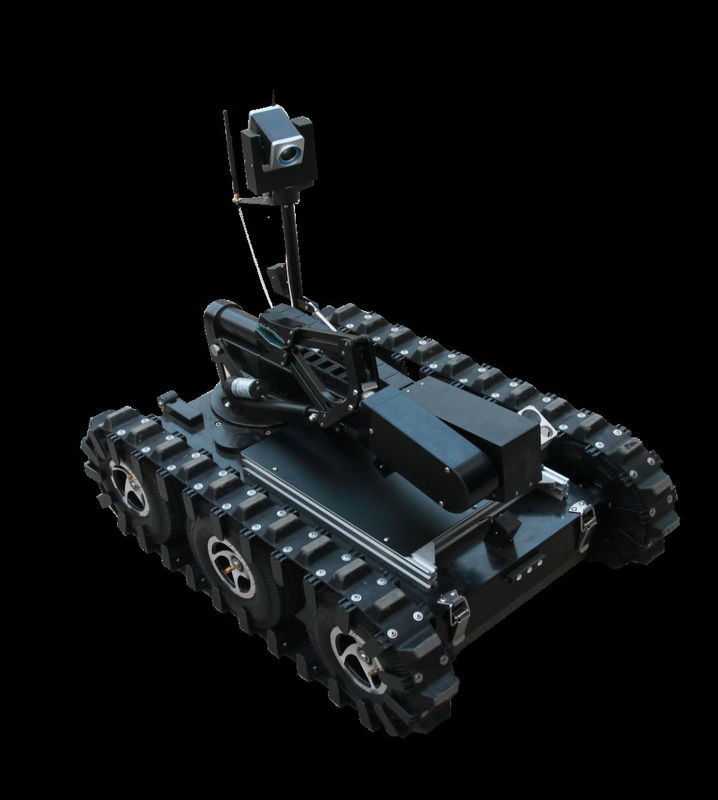
爆発物処理の(EOD)のロボット
モデル:HW-18
![]()
プロダクト概観:
EODのロボットは移動ロボット ボディおよび制御システムから成っています。
移動ロボット ボディは箱、電気モーター、ドライブ、メカニカル・アーム、揺りかごの頭部、モニタリング システム、照明、爆薬のdisrupterの基盤、充電電池、牽引リング、等から成っています。
メカニカル・アームは大きい腕、望遠鏡腕、細い腕およびグリッパーから成っています。それは腎臓の洗面器で取付けられ、直径は220mmです。二重電気滞在の棒および倍によってエア作動させる滞在の棒はメカニカル・アームで取付けられています;揺りかごの頭部は折りたたみです。エア作動させた滞在の棒、カメラおよびアンテナは揺りかごの頭部で取付けられています;モニタリング システムはカメラ、モニター、アンテナ、等から成っています;1組のLEDはボディの前部とボディの背部でつきます;このシステムはDC24Vの鉛酸の充電電池によって動力を与えられます;制御システムはセンター・コントロール システム、制御箱、等から成っています。
制御システムの任意タッチ画面は初心者が作動することができるがように適しています。EODのロボット ボディの任意付属品:尾、無線送信のアンテナ、ハードウェア用具(カッター、ホック、熊手、ドリルおよびクリッパーを含んで下さい)。
アプリケーション環境
- 公共の場(地下鉄、空港、駅、ショッピング モール、会議場、等)の疑った目的の移動そして破壊
- 、路傍爆弾の除去および鉱山の除去、等無駄な除去のような環境で適用される。
- 危険な生物的および有毒な環境の下の材料の取って来ることおよび移動。
- 台なしの環境内の下検分、検出、材料の取って来ることおよび後移動
- 災害。
- 放射線の環境、簡単な検出の下の材料の取って来ることおよび移動
- 保守作業。
技術的な変数
| パラメータ名 | 変数索引 |
| ロボット ボディ | |
| ボディ材料 | 航空機等級のアルミ合金、精密機械化 |
| 重量 | 92.8KG (付属品、パッケージおよび制御箱なしで) |
| 次元 | 長さ920mm *幅625mm *高さ515mm |
| 電池 | DC24Vの鉛の酸の充電電池 |
| 作業時間 | 5時間以下 |
| 最高のグリッパーの拡張の範囲 | 255mm |
| 最高のメカニカル・アームの広がり | 1960mm |
| 拡張可能なメカニカル・アームの長さ | 500mm |
| 最高の動きの速度 | 1m/s (ノート:リモート・コントロール、stepless速度control.maxの速度は24V電池に基づいて1m/sについてあります。) |
| 等級の能力 | それは45°の斜面に上り、斜面で着実に停止できます。 |
| 上昇階段能力 | 牽引なしの援助を使うと、それは160mmのステップ高さおよび45°angle斜面の階段の上下に上ることができます。 |
| 過剰障害容量 | それは320mmの高さの障害を交差できます。 |
| 回転能力 | 横のセメントの地面か瀝青舗装では、ロボットは右回りか逆時計回り360ºを回すことができます。 |
| 限られた道の幅 | ≥700mm |
| 負荷機能 | 160KG |
| 抗力機能 | ≥500N |
| 機能をつかむこと | 10/40KG (広げ、引いて下さい)。それは40KGの重量を締め金で止めることと動くことができ、落ちません(実際の測定)。 |
| 6メカニカル・アームDOFs |
グリッパーの入り口および完了 |
| 回転角度 |
グリッパーは右回りおよび逆時計回り360ºを回すことができます; |
| カメラの数 | 4 |
| 前方カメラ | 色の赤外線誘導 |
| 後方のカメラ | 色の赤外線誘導 |
| 揺りかごのヘッドさまざまな焦点カメラ | 色の赤外線誘導 |
| グリッパーのカメラ | 色の赤外線誘導 |
| フラッドライト | 2グループLEDのフラッドライト(前部および背部の各グループ) |
| 間隔を制御して下さい | 無線制御:≥500m;ワイヤー制御:100m (任意200m); |
| 制御箱 | 制御箱のボタンでそしてハンドル、オペレータはビデオ スイッチ、ズームレンズ、フラッドライト回る、移動、揺りかご望遠鏡腕、グリッパーの入り口および完了、回る、細い腕持ち上がる、大きい腕手首回る腎臓の回る洗面器等制御できます。 |
| 反干渉の性能 |
A.静電放電テストに従っての |
| 監視の揺りかごの頭部 | |
| モジュール設計 | 外的な相互連結のない揺りかごの頭部はロボット ボディから容易に取除くことができます。 |
| ビデオ録画 | 揺りかごはその後容易な見ることのための実時間ビデオを記録できます。 |
| 揺りかごの頭部のDOFs |
2独立者DOFsの調節可能な回転速度: |
| 操作制御ターミナル | |
| 制御箱 | 、携帯用、ちり止め防水、高力 |
| 次元 | ≤ L 460mm * W 370mm * H 260mm |
| 重量 | ≤ 10kg |
| 表示サイズ | 12インチのHB LCDの広い視野角、屋外の明確なイメージ |
| 操作 | 良質のロッカーのハンドル、人間のソフトウェア インターフェイスの設計、容易な観察および便利な操作 |
| イメージを示して下さい | それは4つの映像信号を同時に監察するか、または別に4つの映像信号の1つを増幅できます。 |
| 情報表示装置 | 実時間シミュレーションはロボット速度、電圧、姿勢、等の情報を示します。 |
| 電池 | 十分に満たされた場合再充電可能な24Vリチウム電池、作業時間の≥ 5.1時間。 |
| タッチ画面制御 | 任意タッチ画面制御は使用に初心者のために適しています。 |